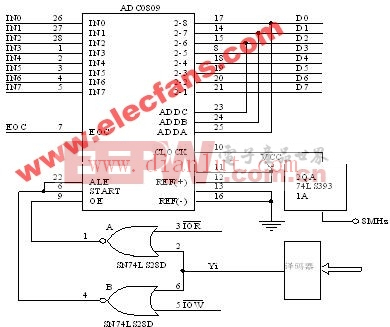
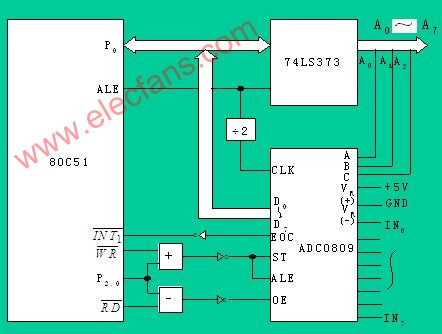
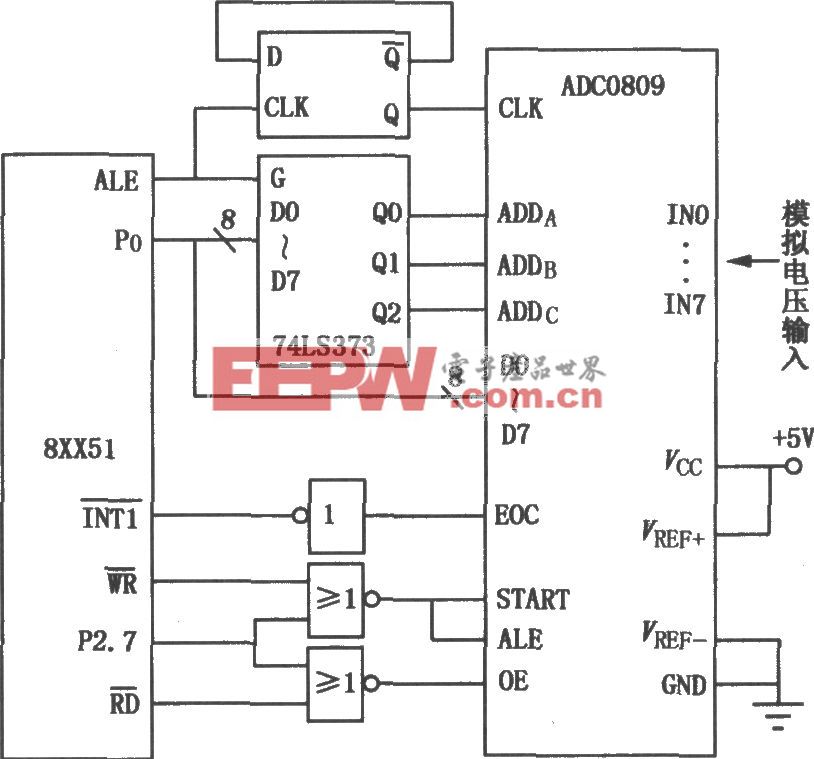
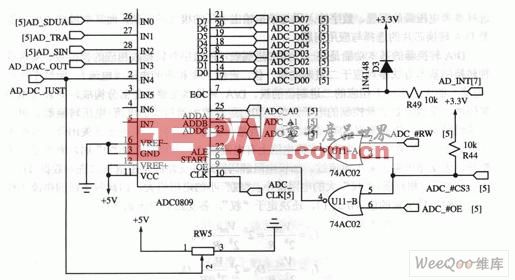
ADC0809AD轉(zhuǎn)換器基本應(yīng)用技術(shù)

T0X: NOP
MOV TH0,#(65536-4000)/256
MOV TL0,#(65536-4000) MOD 256
MOV DPTR,#DPCD
MOV A,DPCNT
ADD A,#DPBUF
MOV R0,A
MOV A,@R0
MOVC A,@A+DPTR
MOV P1,A
MOV DPTR,#DPBT
MOV A,DPCNT
MOVC A,@A+DPTR
MOV P2,A
INC DPCNT
MOV A,DPCNT
CJNE A,#8,NEXT
MOV DPCNT,#00H
NEXT: RETI
DPCD: DB 3FH,06H,5BH,4FH,66H
DB 6DH,7DH,07H,7FH,6FH,00H
DPBT: DB 0FEH,0FDH,0FBH,0F7H
DB 0EFH,0DFH,0BFH,07FH
END
8. C語(yǔ)言源程序
#include AT89X52.H>
unsigned char code dispbitcode[]={0xfe,0xfd,0xfb,0xf7,
0xef,0xdf,0xbf,0x7f};
unsigned char code dispcode[]={0x3f,0x06,0x5b,0x4f,0x66,
0x6d,0x7d,0x07,0x7f,0x6f,0x00};
unsigned char dispbuf[8]={10,10,10,10,10,0,0,0};
unsigned char dispcount;
sbit ST=P3^0;
sbit OE=P3^1;
sbit EOC=P3^2;
unsigned char channel=0xbc;//IN3
unsigned char getdata;
void main(void)
{
TMOD=0x01;
TH0=(65536-4000)/256;
TL0=(65536-4000)%256;
TR0=1;
ET0=1;
EA=1;
P3=channel;
while(1)
{
ST=0;
ST=1;
ST=0;
while(EOC==0);
OE=1;
getdata=P0;
OE=0;
dispbuf[2]=getdata/100;
getdata=getdata%10;
dispbuf[1]=getdata/10;
dispbuf[0]=getdata%10;
}
}
void t0(void) interrupt 1 using 0
{
TH0=(65536-4000)/256;
TL0=(65536-4000)%256;
P1=dispcode[dispbuf[dispcount]];
P2=dispbitcode[dispcount];
dispcount++;
if(dispcount==8)
{
dispcount=0;
}
}

評(píng)論