用STM32對(duì)編碼開關(guān)實(shí)現(xiàn)精確計(jì)數(shù)

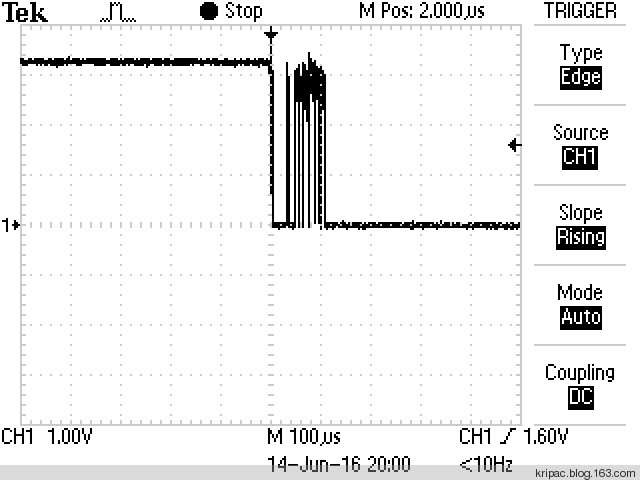
實(shí)際使用時(shí),其輸出的脈沖邊沿可能會(huì)包含很多毛刺,如果簡(jiǎn)單的使用上升沿或者下降沿觸發(fā),在邊沿處會(huì)可能產(chǎn)生很多誤觸發(fā),使用延時(shí)等手段雖能緩解,但從方法到結(jié)果都有蒙混過關(guān)之嫌,不能令人滿意。下圖是我用示波器隨意抓了一個(gè)編碼開關(guān)的下降沿:
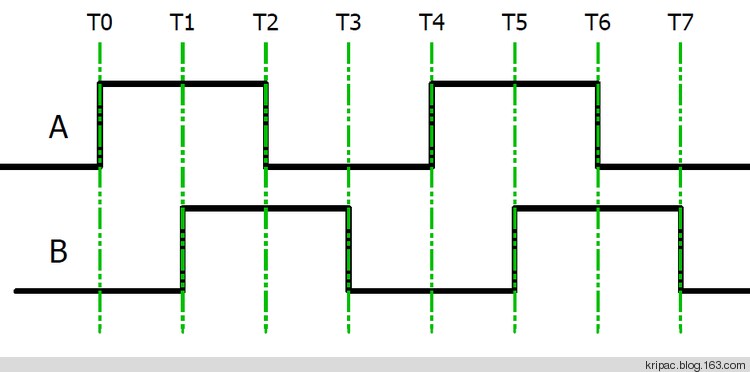
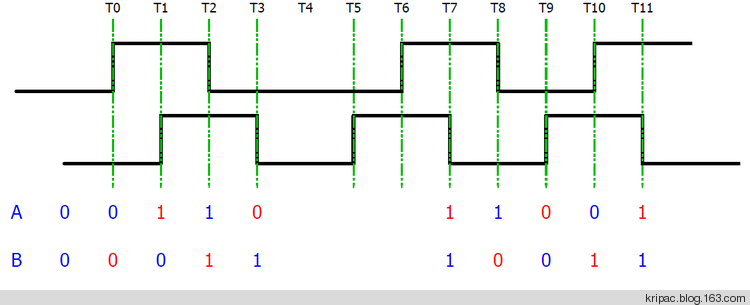
為了能夠可靠計(jì)數(shù),必須避開上升沿和下降沿附近的毛刺,在編碼開關(guān)輸出脈沖信號(hào)的脈沖中段取值,如下圖所示:
2、在 A 相信號(hào)的上升沿/下降沿觸發(fā)中斷中判斷 B 相的狀態(tài),如上圖所示的 T0 時(shí)刻,得到 B 相當(dāng)前的值為 0;
3、在 B 相信號(hào)的上升沿/下降沿觸發(fā)中斷中判斷 A 相的狀態(tài),如上圖所示的 T1 時(shí)刻,得到 A 相當(dāng)前的值為 1;
4、建立一個(gè)保存 A 相 和 B 相狀態(tài)的數(shù)組,至少可保存 3 組狀態(tài)值,若得到的狀態(tài)值和數(shù)組中保存的上一個(gè)狀態(tài)值相等,說明該次觸發(fā)為毛刺,則不更新狀態(tài)數(shù)組,例如 T1 時(shí)刻由 B 相信號(hào)觸發(fā)的中斷程序中,判斷 A 相信號(hào)為 1 狀態(tài),與 T0 時(shí)刻中的 A:0; B:0 狀態(tài)不同,則更新數(shù)組;若 T1 時(shí)刻后 B 相的上升沿產(chǎn)生毛刺進(jìn)入中斷程序,則因?yàn)樽x取到的 A 相值仍然為 1,因?yàn)楹蜕弦粋€(gè)狀態(tài)相同,不更新狀態(tài)數(shù)組;
5、如此利用 A 相的邊沿觸發(fā)中斷讀取 B 相的值,B 相的邊沿觸發(fā)讀取 A 相的值,就可以保證取樣點(diǎn)位于沒相信號(hào)的中間時(shí)刻;
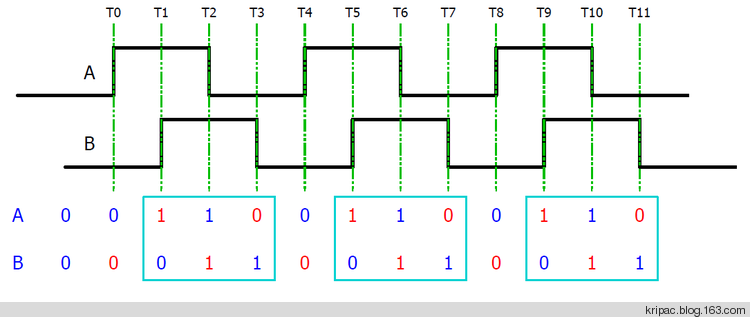
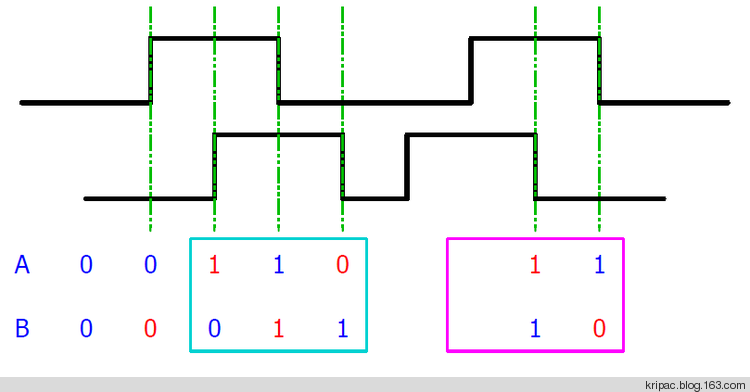
6、在每次狀態(tài)數(shù)組有更新時(shí)判斷編碼開關(guān)的旋轉(zhuǎn)方向,如上圖藍(lán)色框內(nèi)的數(shù)值組合出現(xiàn)時(shí),可以判斷編碼器 +1,反之,如下圖紫色框內(nèi)的數(shù)值組合出現(xiàn)時(shí),可判斷編碼器值 -1;
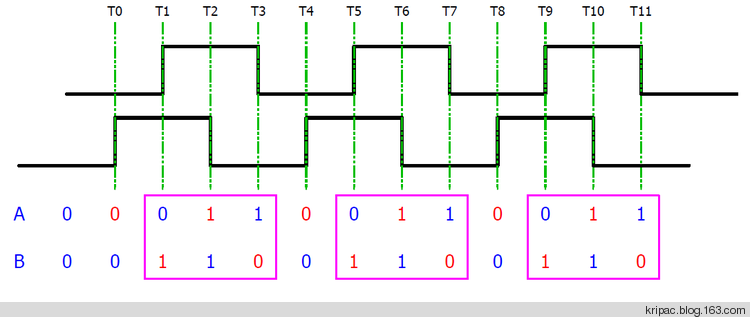
7、當(dāng)編碼器出現(xiàn)中途改變方向的情況時(shí),其輸出的脈沖如下圖所示:
/* Encoder.c */
signed char Phase_A, Phase_B; //按bit位來儲(chǔ)存A/B相的狀態(tài),bit7作為緩存,bit6為最新狀態(tài) //值,然后依次是bit5、bit4,需要更新時(shí),使用右移操作,之 //所以使用有符號(hào)數(shù),是為了右移時(shí)保留bit7的值
void EXTI0_IRQHandler(void)
{
EXTI->PR &= EXTI_PR_PR0; //Clear interrup pending
if(COMP->CSR & COMP_CSR_COMP2OUT) //若編碼器直接連入IO,此處改為判斷IO狀態(tài)即可,我使 //用的是比較器輸出的值來驅(qū)動(dòng)IO產(chǎn)生外部觸發(fā),故為此
{
Phase_B |= 0x80; //Phase_B = 1xxx xxxx
}
else
{
Phase_B &= 0x7F; //Phase_B = 0xxx xxxx
}
if(((Phase_B << 1)^Phase_B) & 0x80) //判斷緩存中的bit7位和bit6位是否相等,若不等,更新緩存
{
Phase_B >>= 1;
Phase_A >>= 1;
if( ((Phase_A & 0x70) == 0x30) && ((Phase_B & 0x70) == 0x60) ) //A:0 1 1, B:1 1 0 序列
{
FlashData_Copy.encoder_count += 1;
}
if( ((Phase_A & 0x70) == 0x60) && ((Phase_B & 0x70) == 0x30) ) //A:1 1 0, B:0 1 1 序列
{
FlashData_Copy.encoder_count -= 1;
}
}
}
void EXTI2_TSC_IRQHandler(void)
{
EXTI->PR &= EXTI_PR_PR2; //Clear interrupt pending
if(COMP->CSR & COMP_CSR_COMP1OUT)
{
Phase_A |= 0x80; //Phase_A = 1xxx xxxx
}
else
{
Phase_A &= 0x7F; //Phase_A = 0xxx xxxx
}
if(((Phase_A << 1)^Phase_A) & 0x80)
{
Phase_A >>= 1;
Phase_B >>= 1;
if( ((Phase_A & 0x70) == 0x30) && ((Phase_B & 0x70) == 0x60) )
{
FlashData_Copy.encoder_count += 1;
}
if( ((Phase_A & 0x70) == 0x60) && ((Phase_B & 0x70) == 0x30) )
{
FlashData_Copy.encoder_count -= 1;
}
}
}
/******************************************************************************
EXTI0 and EXTI2 interrupt setup
******************************************************************************/
void setupEXTI0_2(void)
{
/* EXTI0 config */
SYSCFG->EXTICR[0] |= SYSCFG_EXTICR1_EXTI0_PA;
EXTI->IMR |= EXTI_IMR_MR0;
EXTI->RTSR |= EXTI_RTSR_TR0; //Rising trigger
EXTI->FTSR |= EXTI_FTSR_TR0; //Falling trigger
/* Enable the Selected IRQ Channels --------------------------------------*/
NVIC->ISER[EXTI0_IRQn >> 0x05] |=
(uint32_t)0x01 << (EXTI0_IRQn & (uint8_t)0x1F);
/* EXTI2 config */
SYSCFG->EXTICR[0] |= SYSCFG_EXTICR1_EXTI2_PA;
EXTI->IMR |= EXTI_IMR_MR2;
EXTI->RTSR |= EXTI_RTSR_TR2;
EXTI->FTSR |= EXTI_FTSR_TR2;
/* Enable the Selected IRQ Channels --------------------------------------*/
NVIC->ISER[EXTI2_TSC_IRQn >> 0x05] |=
(uint32_t)0x01 << (EXTI2_TSC_IRQn & (uint8_t)0x1F);
}
該方案外圍電路簡(jiǎn)單,無需電容濾波,因采樣點(diǎn)為脈沖中部,故工作可靠,在編碼器的特定位置做上記號(hào)用手隨意改變方向和速度做測(cè)試,最后總能在編碼開關(guān)回到原位置時(shí)歸零,缺點(diǎn)是需要IO具有上升/下降沿的雙向邊沿觸發(fā)能力,以及使用了中斷程序占用了部分資源。

評(píng)論