相位噪聲的時域測量方法

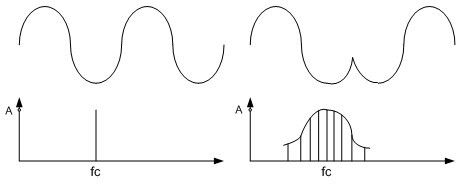
圖1 正弦信號的頻譜(無相位變化以及有相位變化的可能情形)
為了更為精確的描述相位噪聲,通常定義其為在某一給定偏移頻率處的dBc/Hz值,其中,dBc是以dB為單位的該頻率處功率與總功率的比值。如一個振蕩器在某一偏移頻率處的相位噪聲定義為在該頻率處1Hz帶寬內(nèi)的信號功率與信號的總功率比值,即在fm頻率處1Hz范圍內(nèi)的面積與整個噪聲頻下的所有面積之比,如下圖2所示。
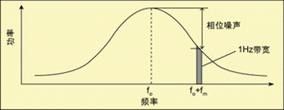
圖2 相位噪聲的基本定義
二、TIE抖動的基本概念及其與相位噪聲的關(guān)系
TIE(Time Interval Error),時間間隔誤差,是指信號的實際邊沿與其理想邊沿之間的偏差,理想邊沿可以為固定頻率信號的邊沿位置,如100MHZ的信號,那么上升邊沿位置就固定在10ns的整數(shù)倍位置處;也可以通過CDR(時鐘數(shù)據(jù)恢復(fù))的方法恢復(fù)出的時鐘作為理想時鐘。如下圖3所示,實際時鐘信號的每一個實際邊沿位置與理想時鐘的邊沿位置都會做一個比較,它們之間的差值就叫做TIE抖動。
圖3 TIE抖動參數(shù)的測量方法
三、基于示波器的相位噪聲測量方法
根據(jù)上文的分析,相位噪聲是指信號相位的隨機(jī)性波動的功率譜密度,在頻域里相位噪聲通常被表達(dá)為dBc/Hz。如果信號的相位噪聲值非常小,那么則需要使用具有高動態(tài)范圍的頻域儀器進(jìn)行測量,才能得到較好的結(jié)果。如果信號的相位噪聲在-70dBc(或者結(jié)合平均方法為-80dBc)以上,則可以選擇使用示波器進(jìn)行測試。目前測量相位噪聲主要有三種儀器,一是頻譜儀,二是示波器,三是專用的相位噪聲分析儀。頻譜儀中通常具有相位噪聲的測試項,可以從信號頻譜上測量出相位噪聲的值并進(jìn)行適當(dāng)?shù)男拚纯?,測試原理即為測試某一指定偏移頻率處的功率電平(1Hz帶寬內(nèi))與載波總功率電平的比值;使用示波器進(jìn)行相位噪聲的測量則是在時域里先測試出抖動,然后再將抖動值按照上述提到的相位噪聲與抖動的轉(zhuǎn)換關(guān)系轉(zhuǎn)換得到;由于示波器和頻譜儀的動態(tài)范圍有限,因此對于很小的相位噪聲很難測試得非常準(zhǔn)確。因此如果需要準(zhǔn)確的測試比較小的相位噪聲時,則可以選用專門測試相位噪聲的相位噪聲測試儀。
下面為使用力科示波器對相位噪聲的測量方法及步驟:
Step1:在示波器的“Timebase”按鈕中選擇“Fixed Sample Rate”,并設(shè)置一個合理的采樣率以確保在信號邊沿上采集到足夠多的樣本點,如圖4所示。
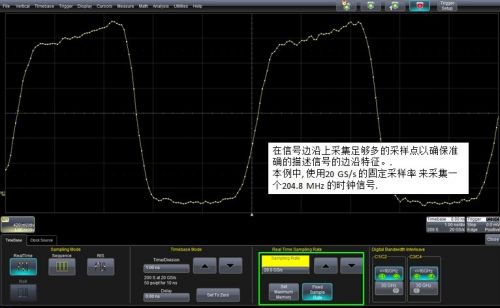
圖4 使用力科示波器測量相位噪聲步驟1
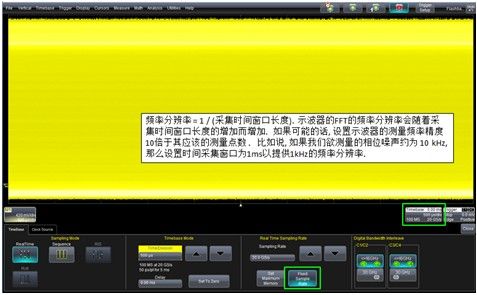
圖5使用力科示波器測量相位噪聲步驟2
Step2:設(shè)置示波器的最小采集窗口時間至少為1ms,這將在FFT頻譜中提供1KHz的頻率分辨率。時間窗口越長,F(xiàn)FT頻譜的頻率分辨率越高(比如說5ms的采集時間窗口將得到200Hz的FFT頻譜分辨率),如圖5所示。
Step3:如下圖所示,對于204.8MHz的時鐘信號,為了獲得一個很大的捕獲時間窗口,我們采集了100M的采樣點數(shù),獲得5ms的捕獲時間窗口,如圖6所示。
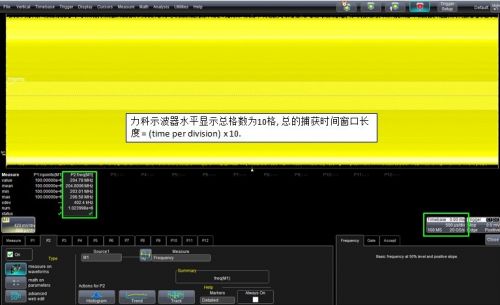
圖6使用力科示波器測量相位噪聲步驟3
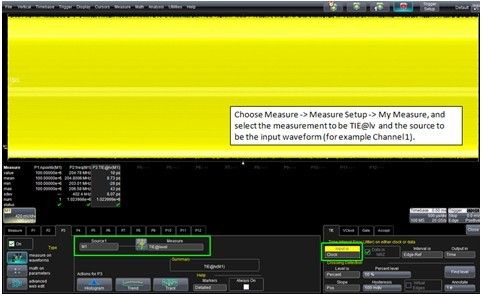
圖7使用力科示波器測量相位噪聲步驟4
Step4:測量時鐘波形的TIE抖動。設(shè)置輸入源為時鐘,如圖7所示。
Step5:在TIE參數(shù)設(shè)置欄里的VClock中選擇“Find Frequency”,如圖8所示。
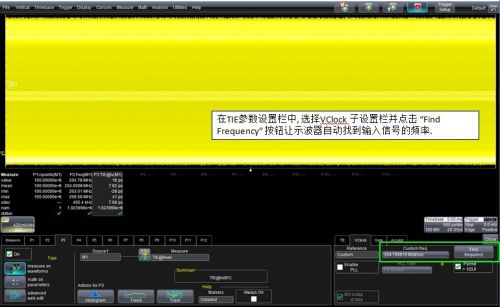
圖8使用力科示波器測量相位噪聲步驟5
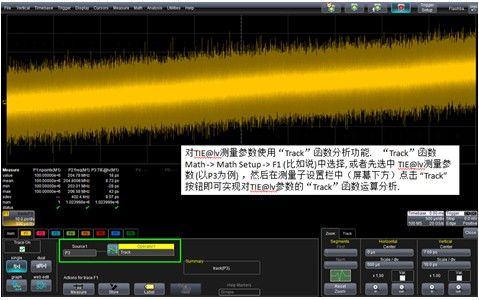
圖9使用力科示波器測量相位噪聲步驟6
Step6:對TIE測量參數(shù)進(jìn)行“Track”函數(shù)分析,如圖9所示。
Step7:關(guān)掉 PLL并適當(dāng)微調(diào)“Customer Frequency”以獲得“Track”函數(shù)曲線的最大平坦度,如圖10所示。

圖10使用力科示波器測量相位噪聲步驟7
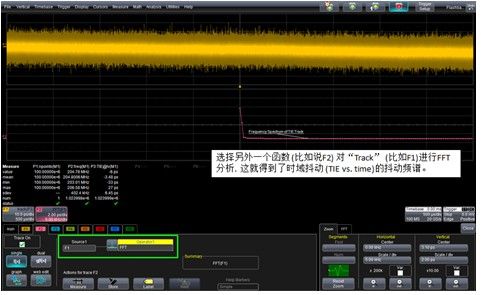
圖11使用力科示波器測量相位噪聲步驟8
Step8:對Track曲線進(jìn)行FFT分析,如圖11所示。
Step9:選擇FFT參數(shù)設(shè)置中的“Magnitude”、“VonHann”、“LeastPrime”,并去掉“Suppress DC”選擇,如圖12所示。
5959dimg" target="_blank">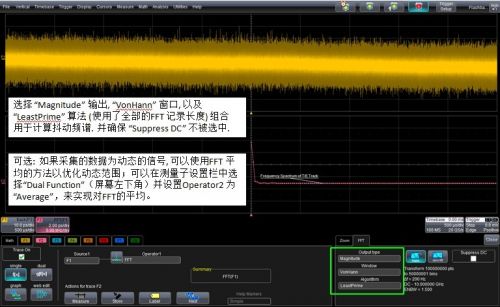
圖12使用力科示波器測量相位噪聲步驟9
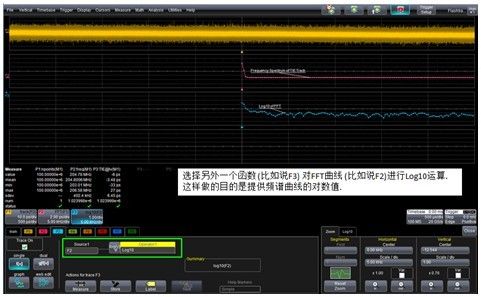
圖13使用力科示波器測量相位噪聲步驟10
Step10:對抖動的FFT進(jìn)行Log10運(yùn)算,如圖13所示。
Step11:在“Rescale”運(yùn)算設(shè)置中,選擇乘以“20”,然后通過下述公式?jīng)Q定需要增加的常數(shù):20log10(pi*carrier frequency)。在本例中,20log10(643398175)=176,在“Rescale”運(yùn)算設(shè)置中輸入該常數(shù)值,如圖14所示。
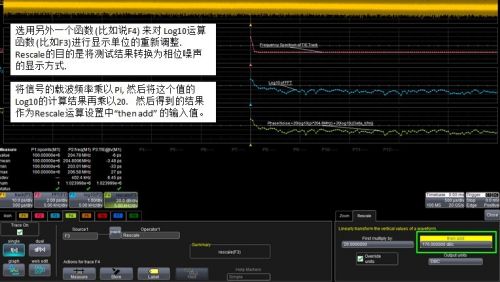
圖14使用力科示波器測量相位噪聲步驟11
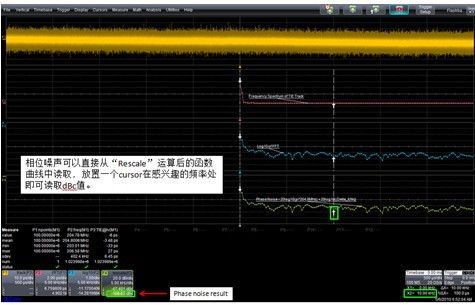
圖15使用力科示波器測量相位噪聲步驟12
Step12:使用一個光標(biāo)放置在相應(yīng)的相位噪聲偏移頻率(比如10khz)位置并直接從F4曲線中讀出cursor對應(yīng)的以DBC為單位的相位噪聲值。如本例中的10khz的相位噪聲為-109.63dBc,如圖15所示。
四、小結(jié)
本文簡要介紹了相位噪聲及其TIE抖動的概念及其相互轉(zhuǎn)換關(guān)系,并重點介紹了基于力科示波器是如何測量出TIE抖動并將抖動參數(shù)轉(zhuǎn)換為相位噪聲的。
五、參考文檔
1、Phase Noise and Jitter Requirements for Serial IO Applications,SI time Application Notes
2、Lecroy Step by Step references:How to measure phase noise,Mike Hertz,Lecroy

評論